Staff Research Scientist · Google DeepMind
Yulia Rubanova
Video generationControllabilityPersonalisationPhysical reasoning
I am a researcher at Google DeepMind, working on video generative models in GenAI. I work on pre-training for Gemini Omni, a frontier multimodal model released at Google I/O 2026. I focus on new capabilities and controls like reference images, audio, and editing.
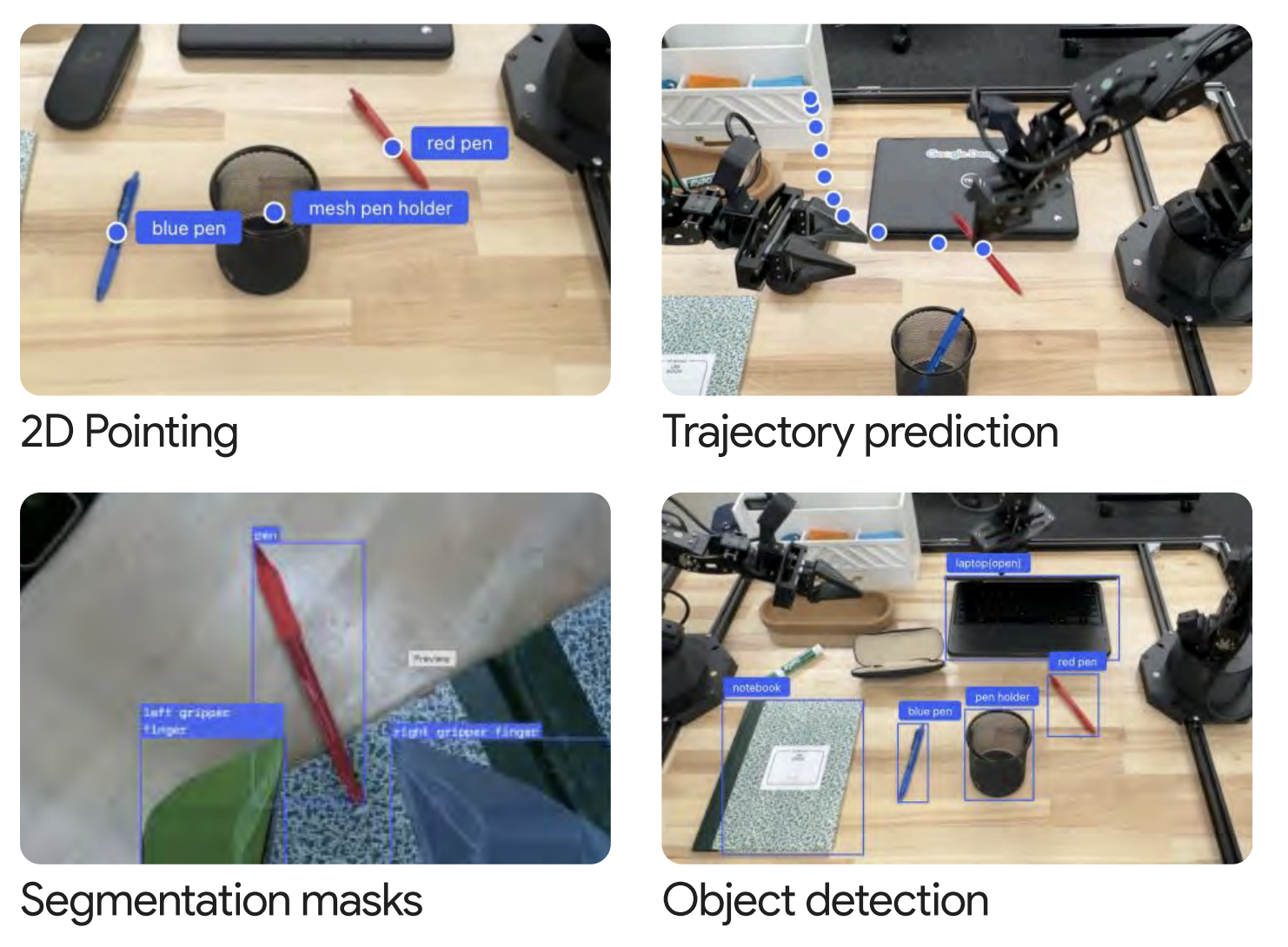
Before Omni, I worked on Veo, including ingredient-to-video and Veo 3.1, building controllable video systems for character consistency, creative production, robotics evaluation, and physical world understanding.
I finished my PhD at the University of Toronto with Prof. Quaid Morris and David Duvenaud. I did multiple internships at Google Brain, including projects on discrete-variable RL for protein design and similarity networks for cancer prediction.
Research vision
Controllability, physical realism and runtime efficiency are crucial next steps for video world models. A leap in controllability is required to turn these models into reliable reasoning tools for real-world applications like robotics and will drive wider adoption of these models.